とりあえずオーディオ出力でサーボ1つは制御できることがわかりましたが、サーボを使う工作の場合、複数のサーボが使えれば、例えばロボットの両腕、自動車の両輪など応用範囲が広がります。
オーディオ信号から複数の制御チャンネルを分離するとなると、まず思いつくのが周波数の分割です。例えば、ロボットの右手を動かすのは高い音、左手は低い音と決めておき、Scratchでそれぞれの音を出すプログラムを作ります。モーターを動かす側で、音の音階の高低をフィルターで区別できれば、音の高低に応じて異なる動作が可能になります。
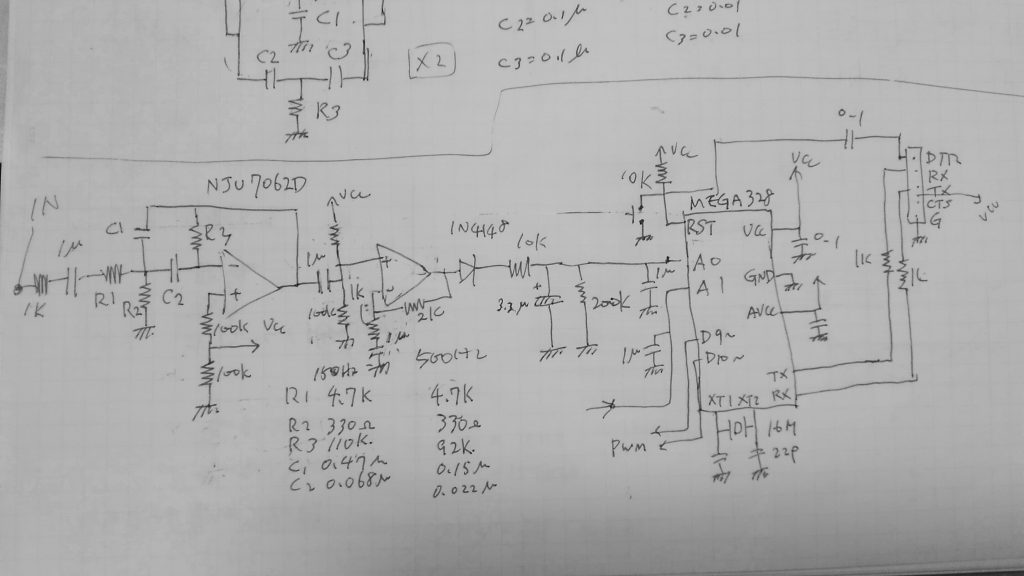
まずCRで基本的なLPF、HPFを作り、オペアンプで信号レベルを上げる方法でテストしてみました。回路は簡単になりますがフィルタの周波数特性がなだらか(いわゆるQ値が低い)ため、チャンネル間の分離が良くありません。
そこで下記のサイトなどを参考にさせて頂き、多重帰還形のアクティブBPFをテストしてみました。
http://sim.okawa-denshi.jp/Fkeisan.htm
Q値は大きくでき、一応動作したのですが、あまり一般的でない定数のCRが必要だったり、1チャンネルのパーツの点数が多くなる、パラメータによっては発振を起こす、などの問題がありました。