FabLab関内さんのワークショップで、「テオ・ヤンセン機構」なるものを作ってきました。
https://fablab-kannai.org/archives/2477
テオ・ヤンセンといえば、物理とアートを融合した、風で動く機械生物「ストランドビースト」で有名なオランダのアーティストです。
https://theojansen.net/
このビーストの機構を参考に簡略化したモデルは、色々な人が公開しておりますが(例:https://monoist.atmarkit.co.jp/mn/articles/1204/25/news006.html)今回のワークショップもそれらを参考に設計されたものだそうでMakerFaireTokyo2019でも出展されていました。
3Dプリンタ出力された複雑なリンクを組み合わせて、あたかも6つの足で動く生物のような動きを作り出します。

オリジナルはスイッチでモーターを制御するだけの有線リモコンで、ワークショップの制限時間内に動かすにはこれで十分なのですが、電子工作派としてはやはり物足りません。というか、FabLabさんもそのへんは十分承知で、改造する余白を残したキットになっています。
昼休みにこの辺りのお話もさせて頂きましたが、制御デバイスもArduino派、RasPi派があるし、制御方法もリモコン派、自律制御派など宗教論争に(w)なってしまうのでその辺は追及しないとのことです。(笑)
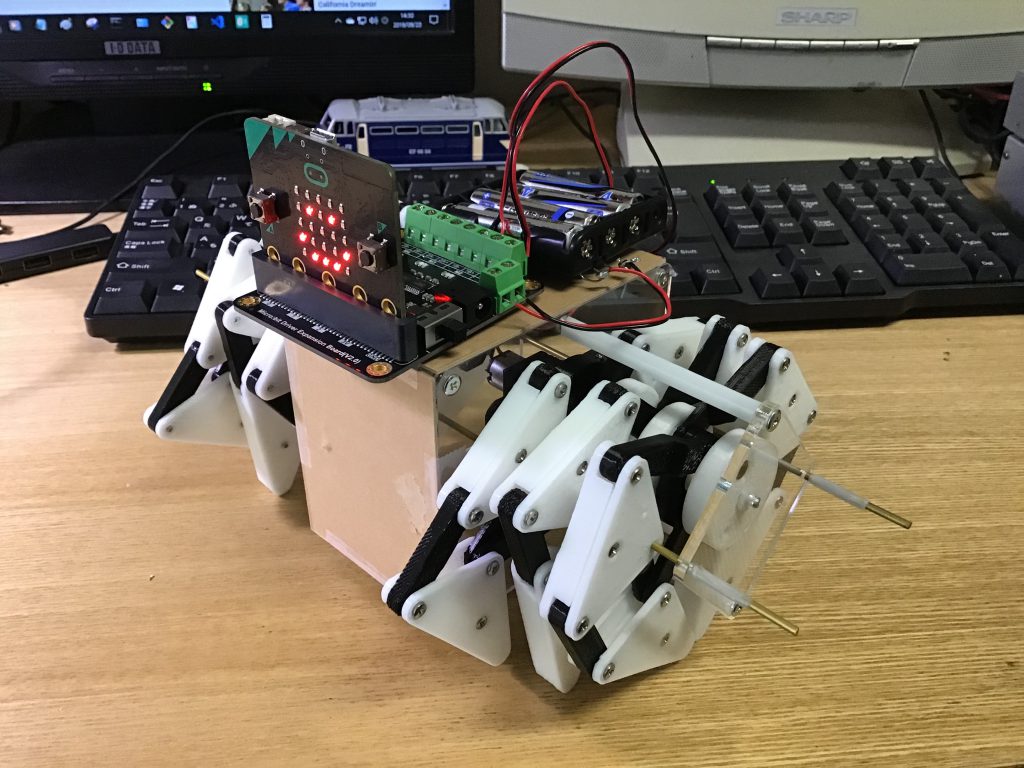
正直どの方法でもいいんですが、一番早くできそうな方法として、micro:bitでラジコン制御にしてみました。
この機構の動力はN20シリーズという、ギア減速のDCモーターを使っています。秋葉原でもネットでも手に入ります。電圧など仕様がいろいろありますが、このキットは6V仕様です。
https://ja.aliexpress.com/popular/gear-box-n20.html

micro:bitでDCモーターを制御するために、今回もDFRobotのモータードライバ基板を使用しました。いろいろ活躍してくれます。
https://www.dfrobot.com/product-1738.html?search=micro%3Abit&description=true&page=3

この基板の電源入力電圧が3.5V~5.5Vで、micro:bitにはレギュレータで落とした電圧がかかりますが、モーターには入力電圧がそのまま印加されます。そのため今回は入力に6V(単4×4)を使用しました。基板の定格を超えますが、まあ誤差の範囲と考えてそのまま行きます。
リモートコントロールには、同じくDFRobotのmicro:bitを使うゲームパッドを使用します。micro:bitにはボタンが2つしかないので、4方向の制御のために傾きセンサーを使う手法がよく採られます。それでもいいのですが、やはりボタンが4つあると素直に操縦できるのでこれを採用しました。

もちろん各種センサーを使用すれば自律制御も可能ですが、それはまたの機会に。
実装した形がこれ。