総合的な学習の時間ではロボットカーは定番の一つです。プログラミング自体を学習する場合もありますが、多くは災害救助ロボとか教科横断的な素材を絡めて実施されるようです。現状LEGO WeDoやマインドストームEV3などよくできた製品がありますが、少々高価(頑丈とか、メリットはあると思いますが)で敷居が高いので、普通のレゴブロックとmicro:bitで簡単にできるものを考えます。
仕様としては、測距センサーで障害物検知して自律で走るもの。最終的には迷路抜けや、目標に着いたら引き返すなどの動きを想定します。
ブロックは手持ちの基本的なセットが使えますが、課題はモーターの部分です。一般的にはDCモーターをギアで減速し、モータードライバ経由でmicro:bitから制御することになりますが、部品の点数が増え、レゴブロックとの接続も問題になります。
そこでモーターは回転サーボを採用することにします。回転サーボは普通のサーボと同様にmicro:bitのPWM出力に繋ぐだけで制御できます。サーボの制御信号の回転角90度の信号で中立となり、モーターは停止します。0度でフルスピードで回転し、180度で反対方向にフルスピードで回転します。角度の信号を変えることで速度が調節できます。
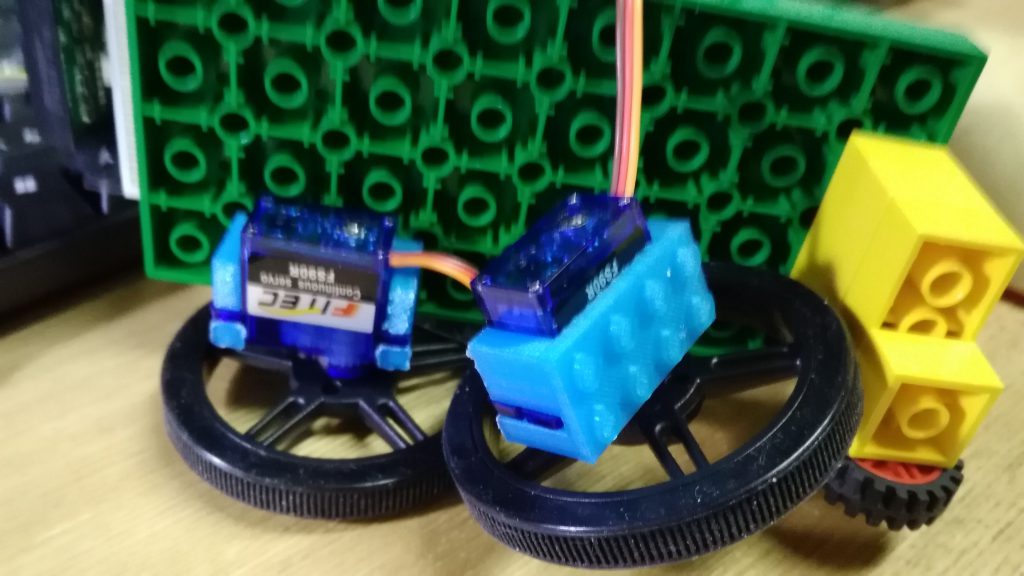
FS90Rという製品が比較的安価で国内では600円程度で入手できます。この製品は普及している模型用サーボのSG90と同じ寸法なので、周辺部品を利用することができます。
もう一つの問題である、モーターのレゴへの取り付けは、専用のパーツを3Dプリンタで作ることにしました。FS90RやSG90をはめて、パチンとレゴに接続できる構造になっています。
測距センサーは赤外線・アナログ出力の安価なもので十分です。秋月電子で450円で入手できます。
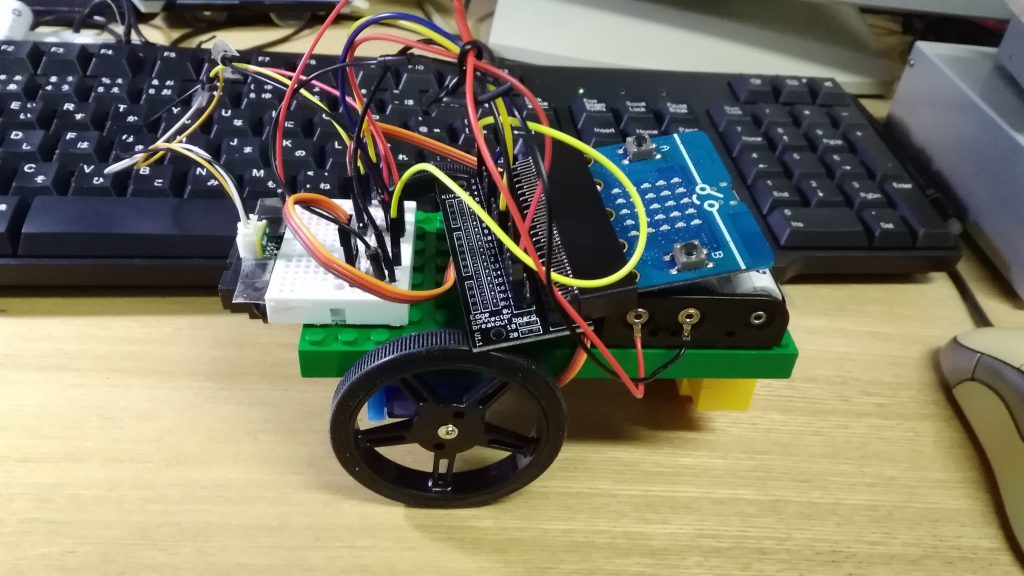
動きは確認できましたので、全体をコンパクトに簡単にまとめるため、基板の作成を考えていきます。